| Hardware Standard |
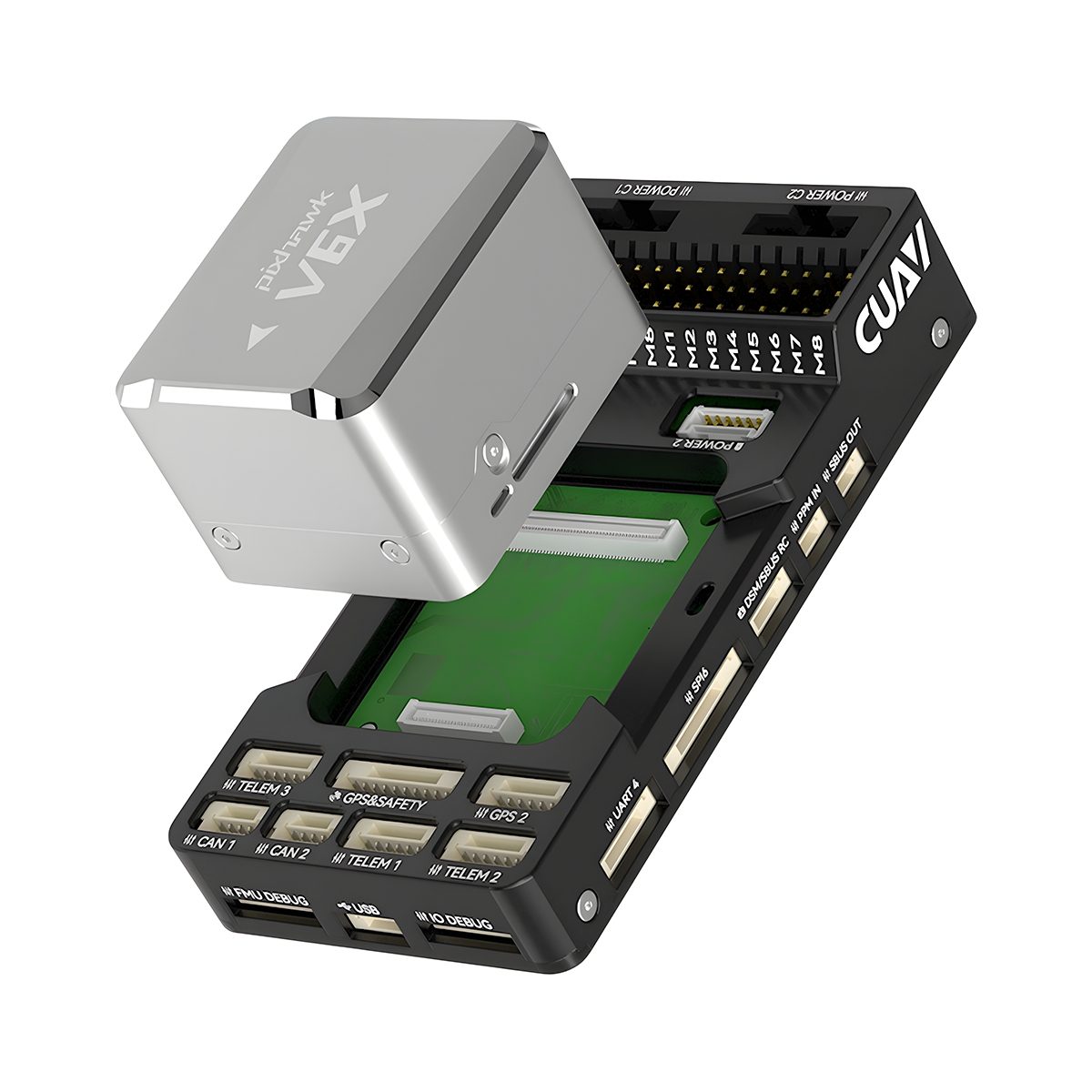
Pixhawk FMUv6x Standard DS-010 Pixhawk AutoPilot Bus Standard DS-012 Pixhawk AutoPilot V6X Standard |
| Processor |
STM32H753IIK6 32-bit Arm® Cortex®-M7 480MHz MCUs, 2MB Flash,1MB RAM |
| Coprocessor |
STM32F10X |
| Accelerometer&Gyroscope |
ICM42688-P ICM-20649 BMI088 |
| Compass |
RM3100 |
| Barometer |
2×ICP-20100 |
| Interfaces |
| PWM I/O |
16 |
| Power |
4 2 for UAVCAN,2 for SMBUS (I2C) |
| GPS |
2 1 GPS port with I2C and safety switch (GPS1) 1 interface with I2C and GPS (GPS2) |
| TELEM |
3 |
| CAN |
2 |
| PPM RC |
1 for PPM receiver |
| SBUS/DSM/RSSI |
1 for SBUS/DSM/Spektrum in and Analog (3.3V)/PWM input |
| SBUS outs |
1 |
| FMU Debug |
1 |
| IO Debug |
1 |
| Ethernet |
1 |
| SPI EXTERNAL1 |
1 (SPI6 interface,for expanding external sensors) |
| ADIO |
1 AD3.3/ADC6.6 |
| UART4 |
1 |
| USB |
2 1 for Type C 1 for GH interface USB |
| TF Slot |
1 |
| Physical characteristics |
| Operating voltage |
4.75~5.45V |
| Servo input voltage |
0~9.9V |
| Operating temperature |
-20~85 |
| Size |
45×90×33.2mm |
| Weight |
98g |